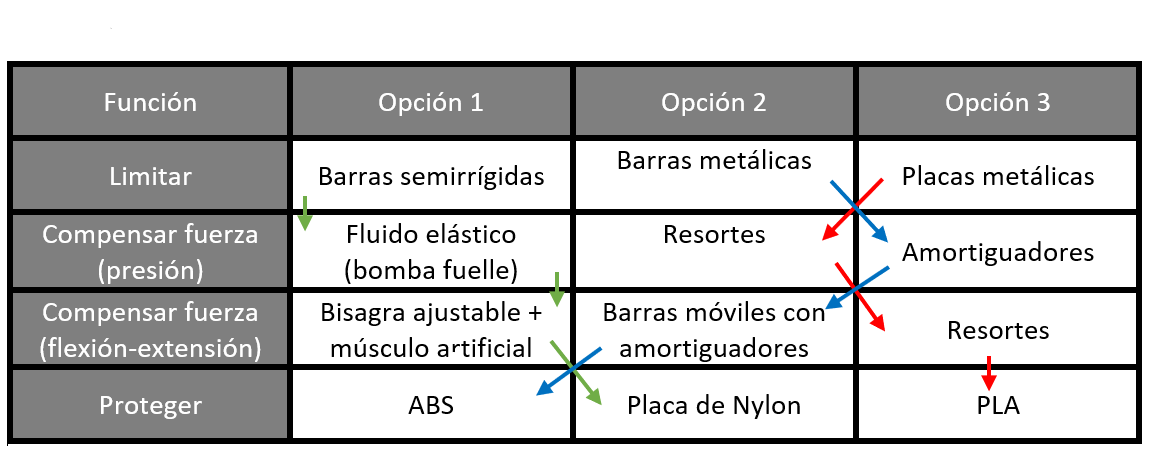
Matriz morfológica:
Concepto de solución 1:
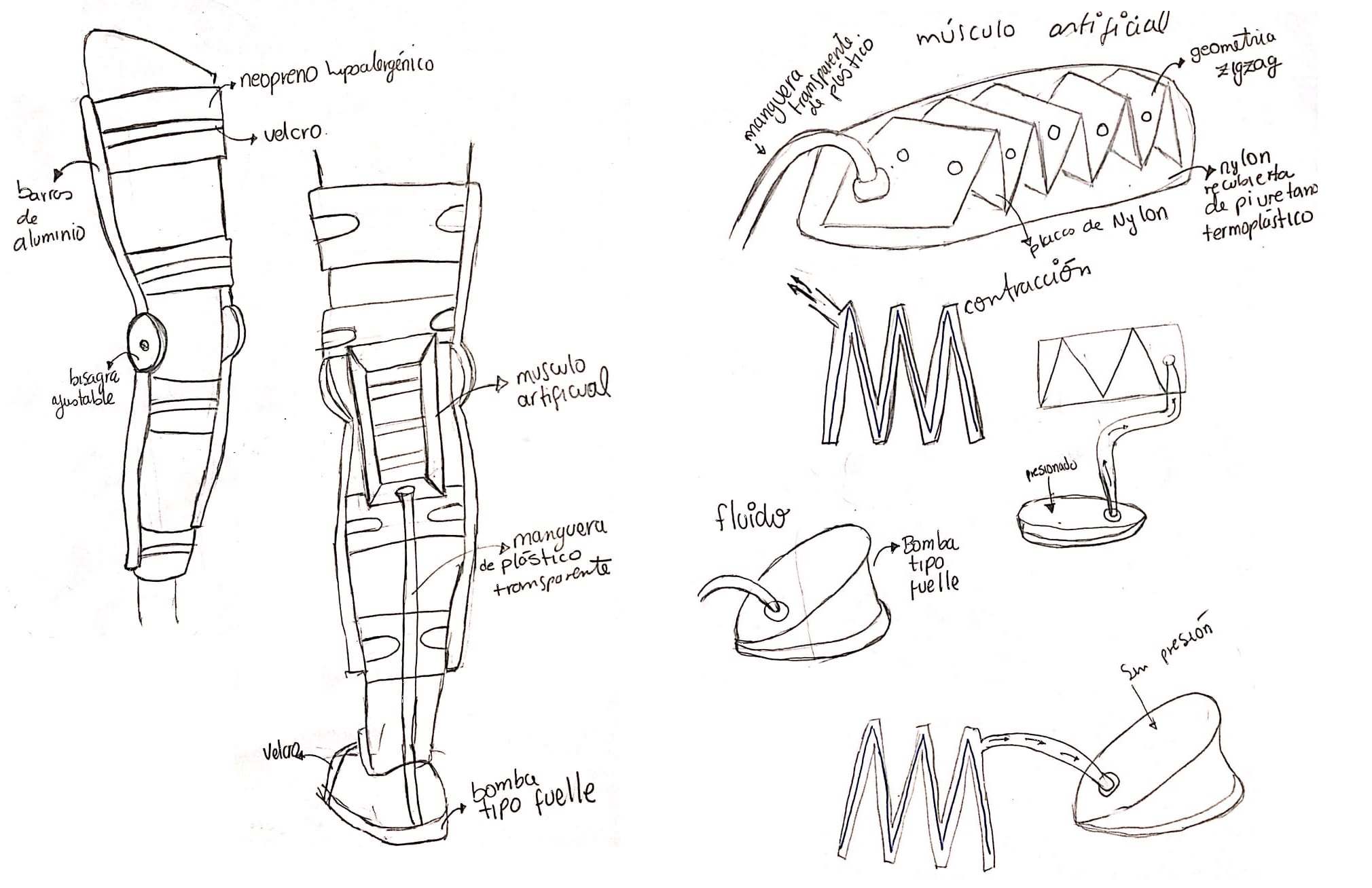
El diseño de esta órtesis está basada en dispositivos similares que se encuentran en el mercado. Estará conformada por dos barras de aluminio laminado (por lado) unidas por una bisagra ajustable para que siga el movimiento natural de la rodilla. Se usará este tipo de aluminio debido a que este presenta una densidad menor al del aluminio puro, también una mayor resistencia y elasticidad.(1,2)(3)
Para los extremos articulares estarán conformadas por cuatro elementos con formas del muslo, 2, pantorrilla, 2, las cuales estarán hechas de neopreno hipo alergénico con tiras de ajuste de velcro.(4)
Para la reducción de impactos generados en la rodilla se usará accionados por fluidos los cuales son los músculos artificiales. Se usarán estos puestos que son simples, generan gran tensión y deformación al momento de actuar, alta eficiencia energética y bajo costo. Para la estructura de este músculo usaremos el diseño y método de fabricación de músculos artificiales inspirados en el fluido impulsados por origami, dicha arquitectura permite programar movimientos complejos multiaxiales, y controlar velocidades. La estructura está conformada por un exoesqueleto el cual tiene que ser sólido y comprimible, una piel flexible la cual sella como una bolsa y cubre los componentes internos, y un medio fluido que llena el espacio interno entre el exoesqueleto y la piel. El estado de equilibrio es en el cual las presiones de fluido interno y externo son iguales, por otro lado cuando existe una diferencia de presiones entre dichos fluidos se induce a tensión en la piel flexible, la cual actúa sobre el exoesqueleto e impulsa a una transformación que se regula por su geometría estructural. (5)
Para la fabricación de nuestra órtesis se usara una estructura interna con geometría simétrica zigzag (contracción lineal del 90%), para una mejor circulación de fluidos la estructura debe tener canales en su estructura, este será un compuesto de placas de nylon de aproximadamente un ancho de plegado de 10 cm, la piel estará hecha de nylon recubierta de poliuretano termoplástico, para el fluido se usara aire. Estudios realizados demostraron que este músculo artificial puede cargar aproximadamente una rueda de automóvil de 22kg y su elevación es de 20cm en 3s.(5)
Para el fluido se usará una bomba fuelle de pie, la cual estará conectada por una manguera de plástico transparente de ½”.
Concepto de solución 2:
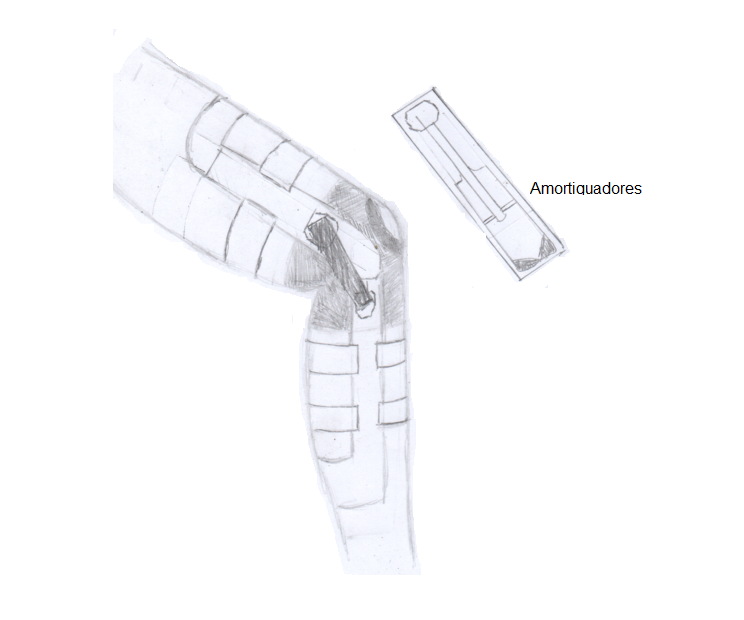
Posee un par de amortiguadores a los costados para disminuir el peso que recibe la rodilla, esta misma está cubierta con tela transpirable (algodón) para que no este muy húmedo, tambien tiene un área libre en la parte frontal rodeada de un rodete de material viscoelástico para mayor comodidad y seguridad.
Las partes que van a servir de soporte serán impresas en 3D de un material ligero pero también resistente, además de ser fácil editarlo de ser necesario, los amortiguadores están basados en los de un auto, sin embargo estos usarán resortes en ves de compresión de aire para que sea posible colocar diferentes amortiguadores dependiendo de la necesidad.
Concepto de solución 3:
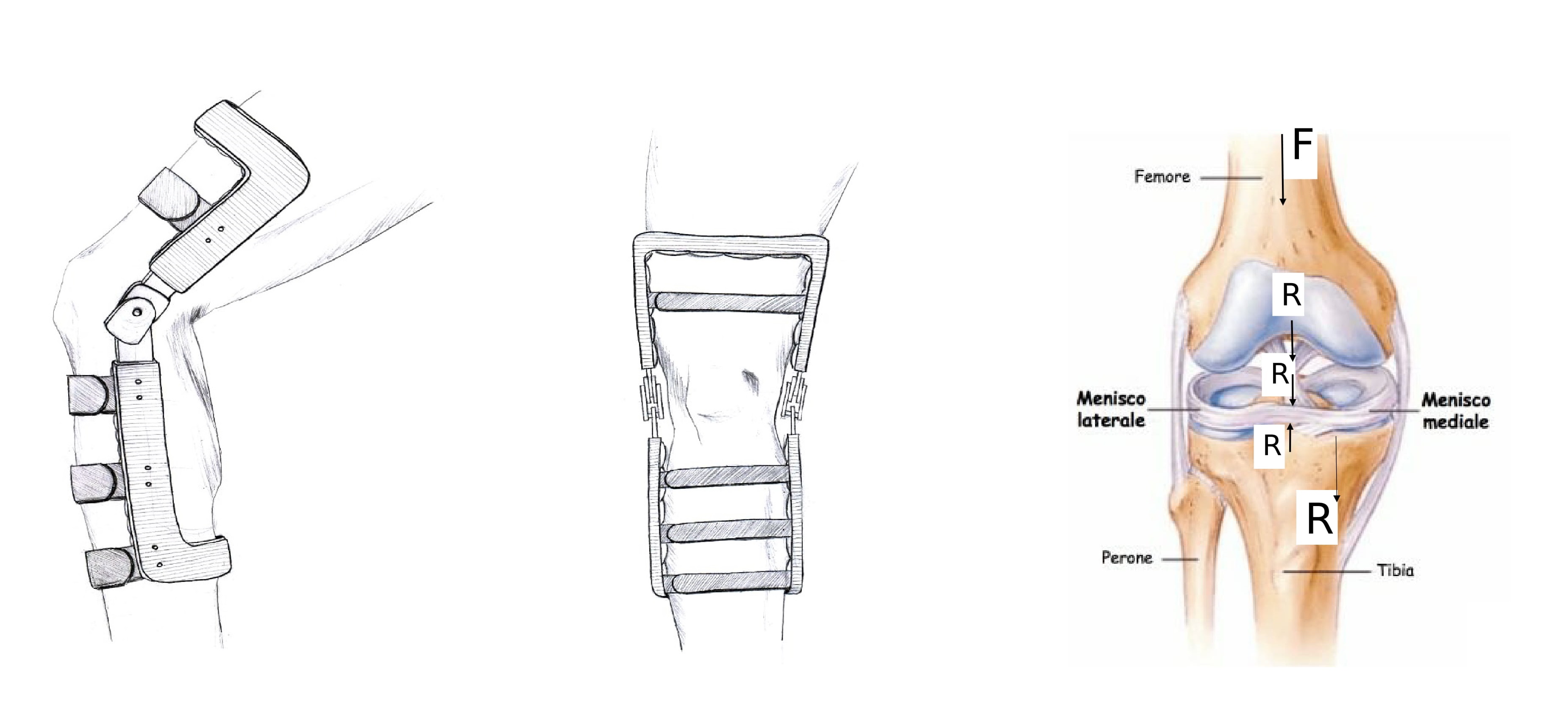
Se trata de una órtesis que centra su funcionalidad en 2 momentos; el primero, al tener la pierna estirada reducir la presión en la articulación en la rodilla, esto lo logrará gracias a los resortes que se encontrarán a la altura de esta y a las 3 barras que podrán redirigir parte de la presión desde el muslo a la pantorrilla. Como segunda función, tiene el de reducir el trabajo realizado al retornar la pierna de la posición de flexión a la de extensión, de lo cual se encargarán un gancho.
El armazón del dispositivo constará de partes duras impresas en 3D y placas de aluminio, el cual es un metal económico y suficientemente duro para brindar rigidez; y para sujetarlo a la pierna se utilizará velcro debido a un tema de comodidad.